MAX_WIENS
PROJECT_LOG
↩ RETURN TO HUB⚡ FEATURED_LOG // Industrial Maintenance Simulation
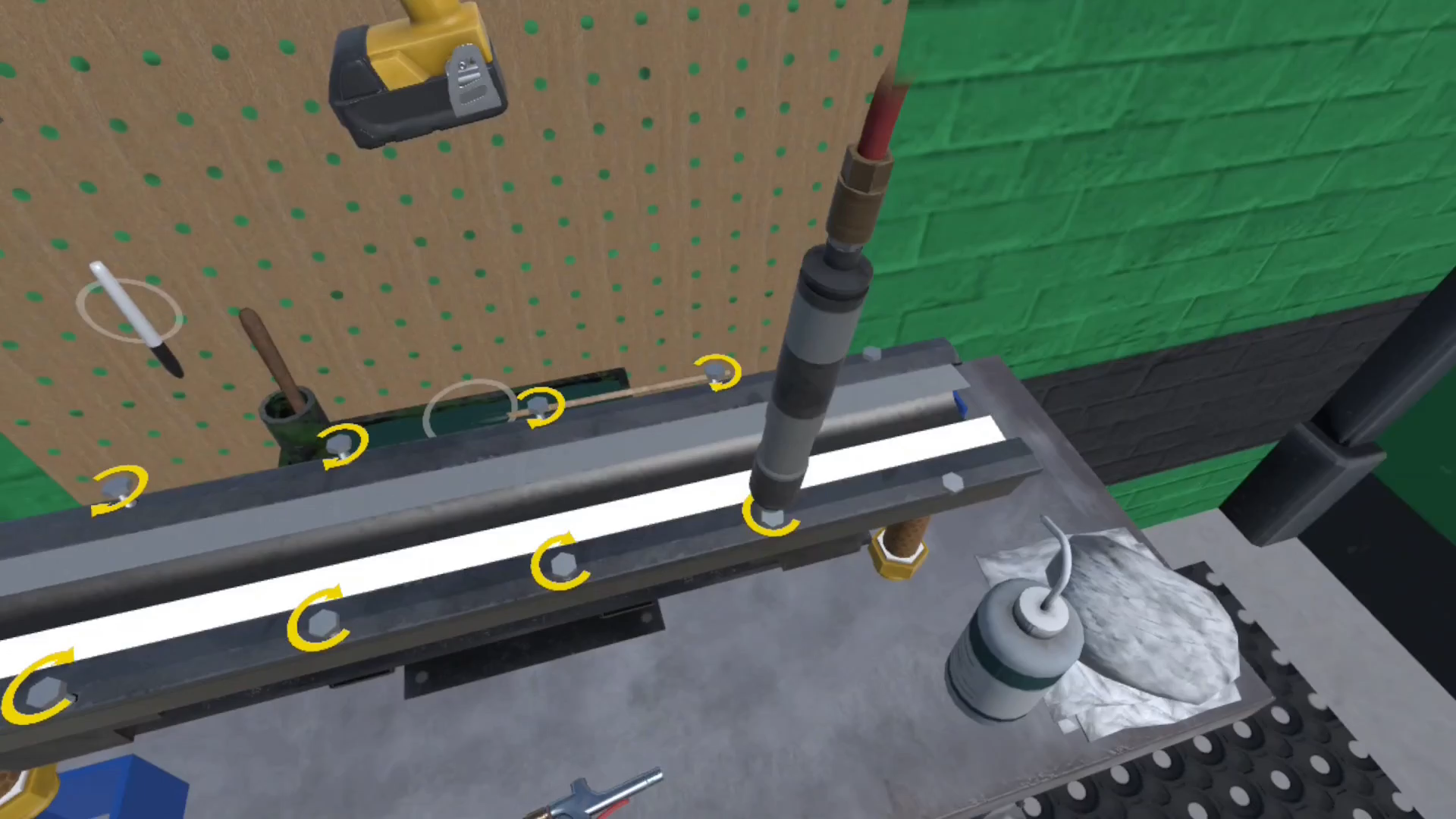
This project was a deep dive into the world of precision industrial maintenance — specifically the technical disassembly and reassembly workflow for a specific model of Doctor Blade Chamber. I built the entire simulation around the exact mechanical sequence used in the real-world process, making accuracy the core design requirement from day one.
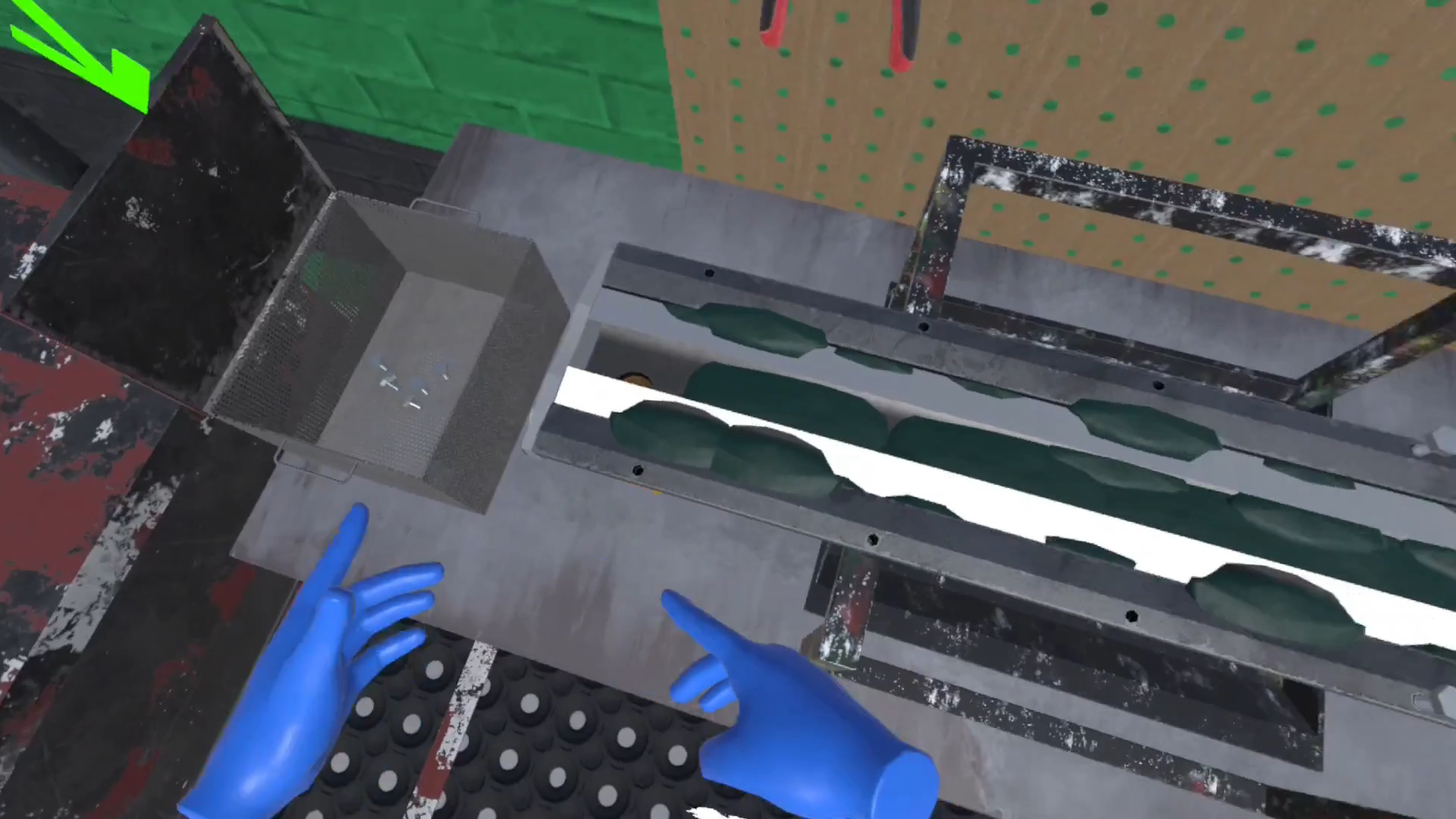
The workflow I engineered begins with the systematic removal of the clamping bars and metering blades, then moves into the extraction of the internal end seals and gaskets. Once the chamber is fully stripped, I implemented an interactive solvent-based cleaning phase where users must properly treat all contact surfaces to remove residual ink and debris before reassembly is permitted — no cutting corners.
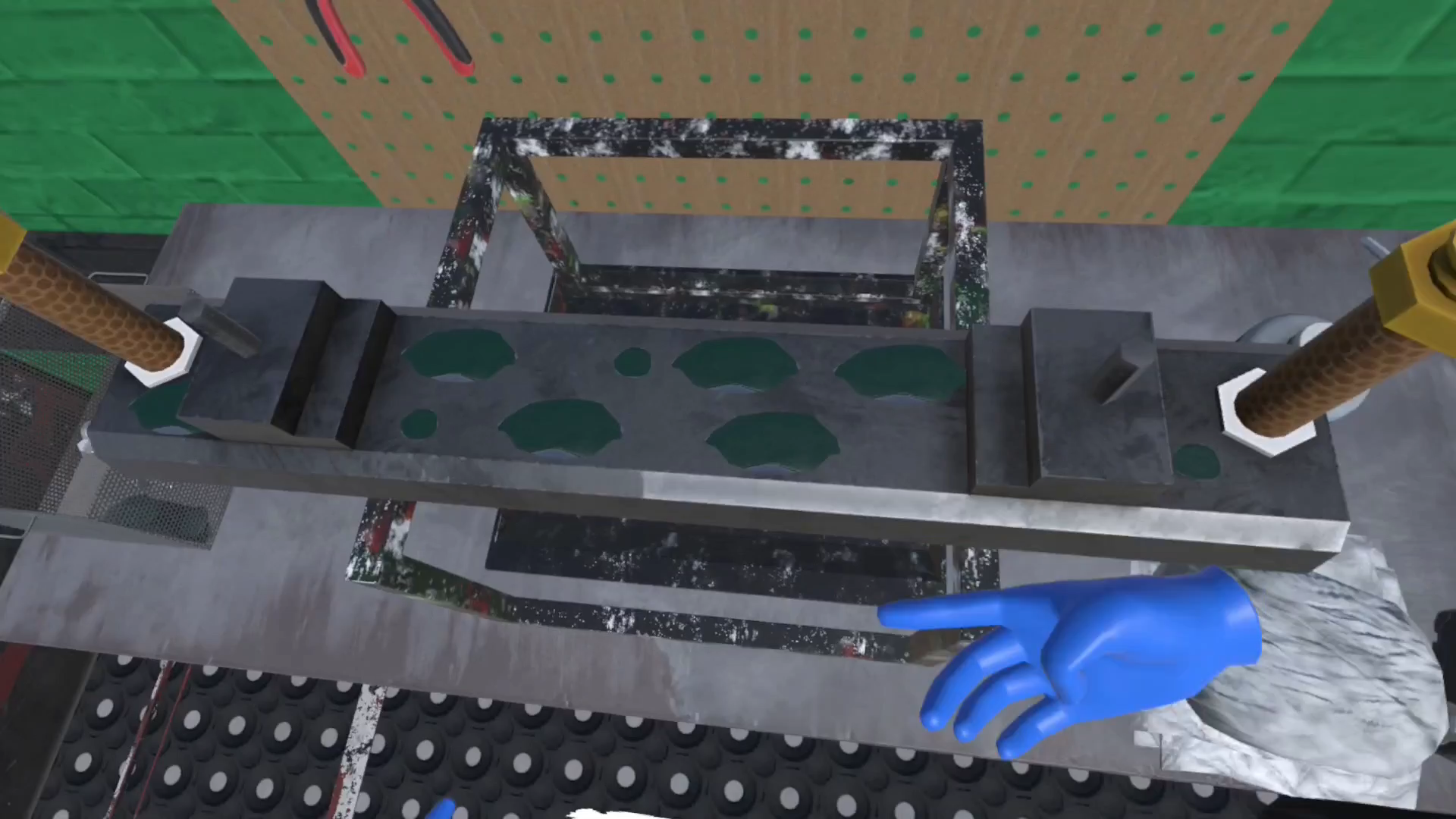
The final phase walks users through carefully reseating the containment blades and new seals in precise sequence to achieve a verified leak-proof configuration. By mapping the exact mechanical order and the chemical cleaning steps directly into the simulation, this project functions as a hands-on procedural guide for maintaining the performance and longevity of this specific hardware model.
Simulation Operational Modules:
- Disassembly Phase: Systematic clamping bar and metering blade removal with physics-accurate interaction and sequenced unlock logic.
- Seal & Gasket Extraction: Precise internal end seal and gasket removal enforcing correct operational order before progression.
- Chemical Cleaning Protocol: Interactive solvent application stage requiring full surface coverage across all contact zones before clearance is granted.
- Reassembly & Verification: Containment blade and new seal reseating with real-time feedback confirming a compliant, leak-proof final configuration.